How to Make a Steerable Robot with a Single Motor
How to Make a Steerable Robot with a Single Motor
October 21, 2014
IEEE Spectrum — Imagine a little robot with six little leggy wheel things that it uses to scurry around on the floor.
This robot is called 1STAR, for “1 actuator STeerAble Robot,” developed by BGU’s Dr. David Zarrouk and Ronald S. Fearing from UC Berkeley.
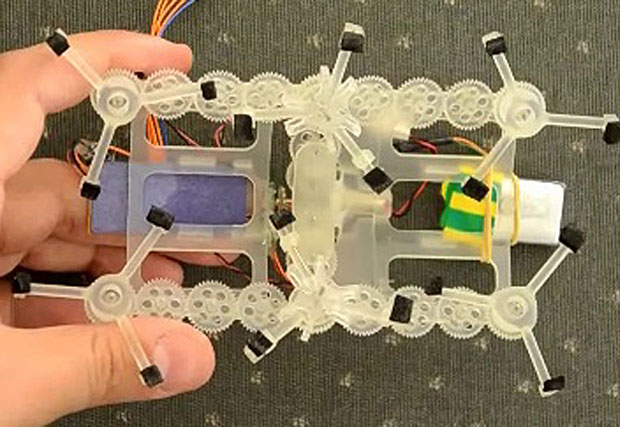
(Photo: Biomimetic Millisystems Lab/UC Berkeley)
Even though it has six legs, and it can controllably move and turn both left and right, it manages to do it with one single motor. 1STAR was inspired by the movement of cockroaches.
To clarify what’s going on here, 1STAR uses a single motor that only turns in one direction. With this motor, it can move itself forward, and it can turn. This is less of a trick and more about ingenious engineering and use of compliant materials.
If you didn’t get that explanation, here’s what’s going on. There are two key things: one is that the center pair of wheel leg things are compliant (springy), while the front and rear pairs are stiff. The second thing is that the single motor is able to finely pulse its acceleration.
1STAR was presented earlier this year at ICRA 2014 in Hong Kong, and mentioned again at the Stanford-Berkeley Robotics Symposium recently at Stanford University.
Read more on the IEEE Spectrum website >>
Stories Like This