BGU Develops Minimally Actuated Robot Arm
BGU Develops Minimally Actuated Robot Arm
December 21, 2017

Prof. David Zarrouk
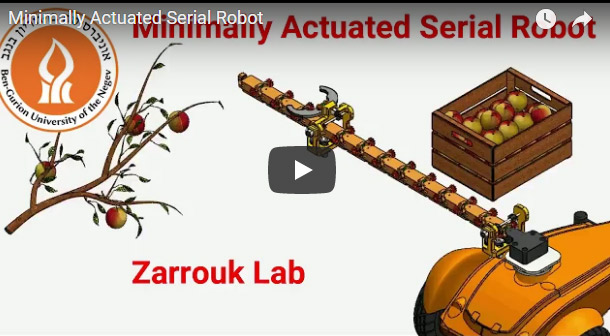
IEEE Spectrum — At Ben-Gurion University of the Negev, Prof. David Zarrouk, a lecturer in BGU’s Department of Mechanical Engineering and head of the University’s Bio-Inspired and Medical Robotics Lab, and his students have developed the Minimally Actuated Serial Robot (MASR), a new kind of manipulator similar to a snake robot, but more cost-effective.
The robot is simple, lightweight and modular, and offers plenty of advantages, as long as you’re not in any sort of hurry.
Essentially, MASR has similar capabilities to a traditional snake robot that uses a series of actuated joints, except that it can only move one joint at a time. This architecture makes this robot much, much slower than a snake robot, but it can also perform some neat tricks that give it a surprising amount of versatility:
For more details, we spoke with Prof. David Zarrouk via e-mail.
IEEE Spectrum: How did you come up with this novel design?
David Zarrouk: We have been developing minimalistic robots for many years. We try to focus on minimizing the number of motors to increase the specific power (motor power divided by the total weight of the robot) of the robot. A few years ago, I realized that in many practical applications of serial robots we often have many motors that are located far from each other and we do not actuate them simultaneously. Since it is impossible to combine these motors together, I came up with the idea to move the motors from one place to another. This concept is simple but it is not bio-inspired by nature, since for living creatures it is impossible to move muscles from one place to another.
In what ways is this robot potentially more useful or capable than a continuum robot?
Continuum robots allow for practically infinite degrees of freedom (DOF). There is currently a lot of research on continuous robots with amazing advances in the field. The robot that we propose here involves discretizing the robot into tiny segments, therefore reducing the number of DOF from infinity to a large number. However, this robot has some advantages.
First, unlike most continuum robots which are soft, this robot is kinematically speaking rigid. In the sense that it does not deform substantially under load. Second, the motion of the mobile motor along the links allows for new maneuvers that do not exist in other robots. For example, for pick-and-place applications, transporting objects inside pipes, and spraying (by placing the spray on the mobile motor and moving it along the links). Third, in this robot, the links and motors are totally decoupled. So it is relatively easy to change the number and size of the links and motors.
Read the full article and interview on the IEEE Spectrum website >>
This article is excerpted from a story by Evan Ackerman, who participated in Americans for Ben-Gurion University’s 2017 Murray Fromson Journalism Fellowship.
Stories Like This